简介
串行总线舵机驱动板是一款专为多舵机控制系统设计的高性能驱动板,集成舵机供电功能和智能控制电路。支持同时控制多达253个总线舵机,提供USB和UART双通信模式,可实时读取舵机角度、负载、电压及工作模式数据。通过9~12.6V宽电压输入兼容ST系列舵机,适用于机械手臂、六足机器人、人形机器人等需要精确多舵机协同控制的场景。板载DC5.5 * 2.1插座与接线端子,配备跳线帽切换控制方式,显著提升机器人项目的开发效率和系统稳定性。
多电源接入兼容设计
串行总线舵机驱动板采用双电源接入设计,同时提供DC5.5 * 2.1插座和接线端子,兼容主流电源适配器与自定义供电方案。确保用户可根据项目需求灵活选择电源连接方式,避免因接口限制导致系统集成复杂度增加。
 DC5.5*2.1插座和接线端子指示图
DC5.5*2.1插座和接线端子指示图双模式控制架构
串行总线舵机驱动板通过物理跳线帽可在A/B模式间自由切换,同时支持设备串口直控与USB上位机控制两种方案:
- 模式A(UART控制):通过串口连接单片机或嵌入式设备,直接发送指令控制舵机群组。
- 模式B(USB控制):通过USB Type-C接口连接计算机,配合上位机软件实现可视化控制。
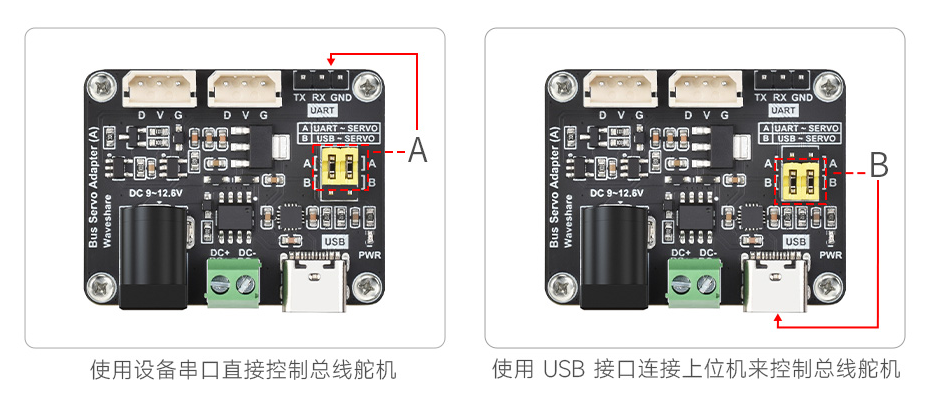 UART控制模式示意图与USB控制模式示意图
UART控制模式示意图与USB控制模式示意图大规模舵机协同控制
串行总线舵机驱动板采用串行总线通信协议,单设备可控制多达253个总线舵机(支持ST3215等系列)。每个舵机支持独立ID分配与模式编程(舵机模式/电机模式),解决了传统PWM控制模式下的线缆冗余问题,大幅简化多关节机器人的布线复杂度。
实时数据反馈机制
串行总线舵机驱动板可持续获取连接舵机的运行状态数据,包括实时角度、负载扭矩、输入电压、温度等参数。该特性使机器人系统具备状态感知能力,适用于需要力反馈控制的精密应用场景(如自适应抓取、步态调整等)。
紧凑型硬件设计
PCB尺寸优化至37×28mm,安装孔距匹配标准2.5mm螺丝。迷你体积使其可嵌入空间受限的应用环境,同时保持完整的舵机驱动与供电能力。
特性
- 用于连接上位机或 MCU 来控制总线舵机转动
- 可同时控制多达253个ST/SC系列总线舵机
- 9~12.6V 电压输入 (输入电压需与舵机电压匹配)
- 提供便捷的总线舵机控制解决方法
- 集成稳定的控制电路,确保总线舵机稳定运行
- 迷你小巧,节省空间,适合嵌入到各种对空间要求较高的项目当中
技术规格
- 供电电压:DC9~12.6V(ST系列舵机)
- 供电接口:5.5*2.1mm
- 通信接口:UART、USB
- 尺寸:42x33mm
- 安装孔径:2.5mm
- 孔径间距:37x28mm
documentstart
相关文档
documentsend
配送清单
- 串行总线舵机驱动板 x1
- 六角螺柱 x4
- 短接帽 x2
- 螺丝 x4











 全部商品分类﹀
全部商品分类﹀

 沪公网安备31011502402448
沪公网安备31011502402448