简介
8x8矩阵激光测距传感器是一款基于ST意法半导体VL53L7CX芯片的64点ToF测距模块,由高性能RP2040微控制器驱动。通过飞行时间(ToF)原理,在一次测量中即可获取视野内64个独立点的距离数据,生成一幅实时的深度数据,最大探测距离达3.5米。8x8矩阵激光测距传感器完美填补了单一测点传感器与复杂深度相机之间的空白,以紧凑的体积、实惠的成本,提供了足以进行物体识别、避障导航和手势交互的“恰到好处”的3D视觉能力。其支持Arduino、micro:bit、ESP32等主流开发平台,提供I2C、UART、USB三种通讯接口,并具备低功耗和即插即用特性,极大降低了在机器人、智能自动化、互动艺术等项目中集成高级感知功能的门槛。
64点矩阵测距,从“看见一点”到“感知一面”
与传统激光测距传感器只能提供单个点的距离信息不同,8x8矩阵激光测距传感器能同时获取8x8矩阵(共64个点)的距离数据。这意味着不仅能判断前方有无物体,更能感知物体的轮廓、相对位置甚至方向。例如,在机器人应用中,能区分出前方是墙壁还是通道,从而实现更智能的避障决策。
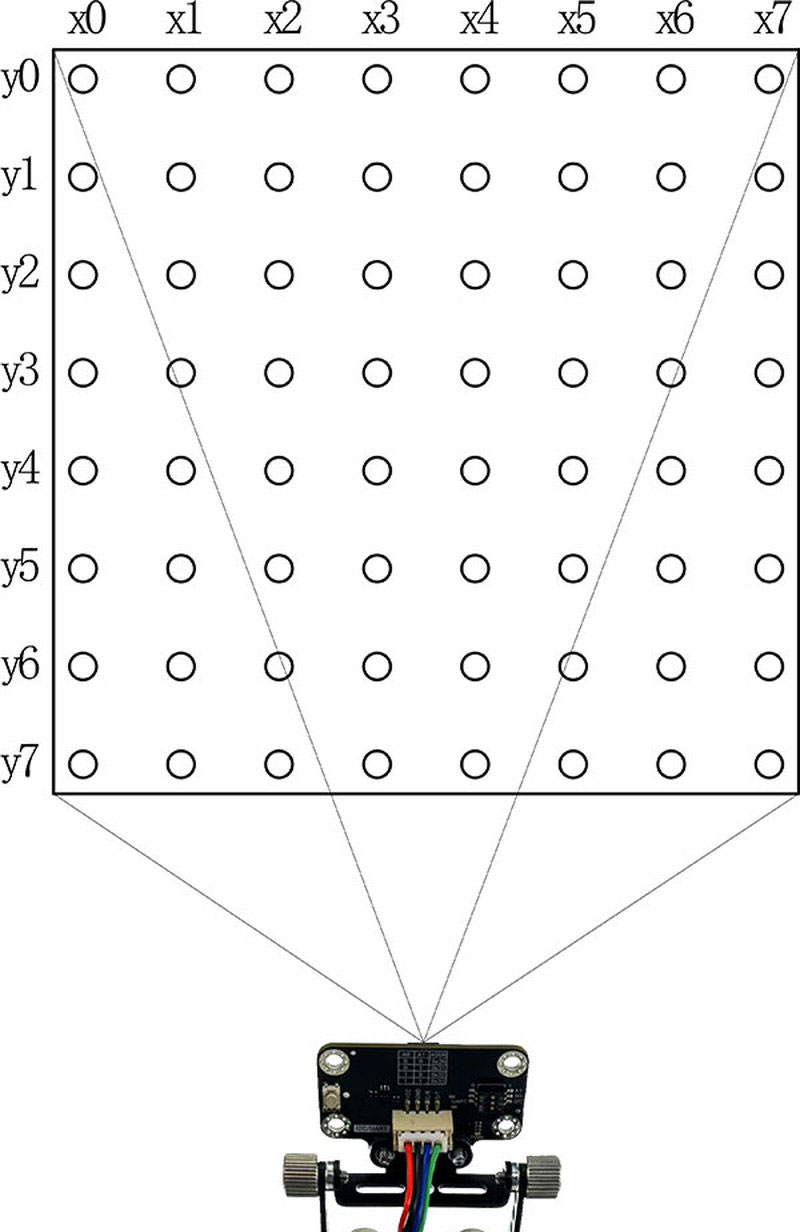 矩阵布局示意图
矩阵布局示意图多目标识别与快速响应,满足实时应用需求
凭借VL53L7CX芯片的高性能,8x8矩阵激光测距传感器能够同时识别视野内的多个目标,并为每个目标报告其距离和位置。最高60Hz的刷新速率确保了数据的实时性,能够流畅跟踪手势运动或快速移动的物体,为需要即时反馈的交互式应用提供了可靠的数据基础。
全平台兼容与极简连接,大幅缩短开发周期
8x8矩阵激光测距传感器专为创客和开发者优化设计。通过标准的Gravity-I2C接口,可以即插即用连接DFRobot系列主控板。同时提供了对Arduino IDE、Mind+、MakeCode等图形化与代码编程环境的完整库文件支持,用户无需研究底层协议,即可快速调用传感器数据,专注于上层应用逻辑开发。
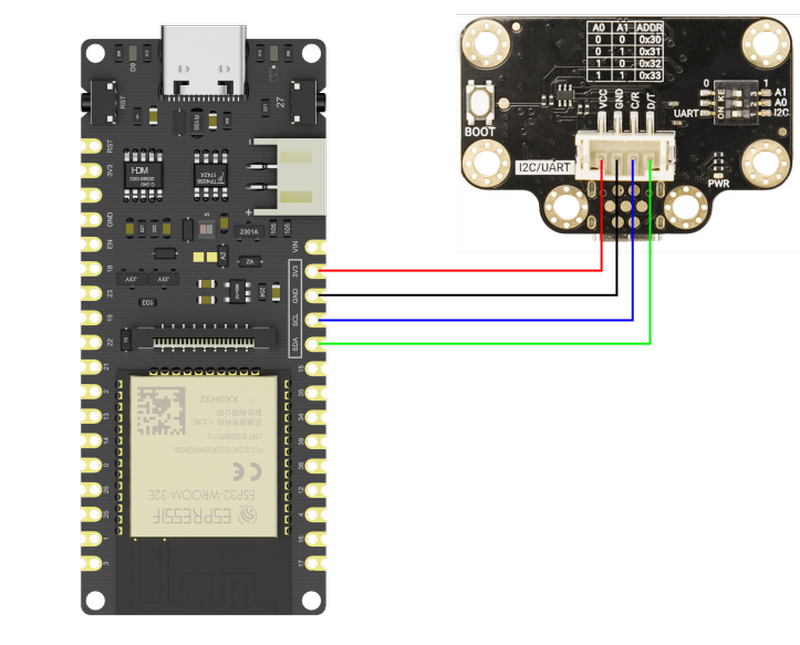 与ESP32主板连接示意图
与ESP32主板连接示意图可级联与固件自定义,提供高扩展性开发平台
8x8矩阵激光测距传感器板载的RP2040微控制器不仅处理传感器数据,更是一个开放的平台。支持设置4个可切换的I2C地址,允许在同一总线上级联多达4个传感器,从而拼合出更广阔的视野。对于高级用户,RP2040支持加载自定义固件,为集成轻量级机器学习(TinyML)模型、实现特定手势识别或边缘计算提供了可能。
应用场景
- 机器人导航:实现顺畅的避障和跌落检测。
- 手势控制:为智能设备提供可靠的非接触式交互。
- 互动装置:艺术展示,如“跟随眼睛”或反应式照明。
- 智能自动化:定向入口监测与智能房间感应。
技术规格
- 传感器参数:
- 传感器型号:VL53L7CX
- 算法处理MCU:RP2040
- 矩阵数量:8*8共64个测距点
- 测距模式:连续测距
- 测距速度:15Hz-60Hz
- 测距范围:20mm-3500mm
- 测距精度:
- 在20 - 200mm范围内,白色目标精度为±11mm,浅灰色目标精度为±12mm,灰色目标精度为±12mm;在200 - 3500mm范围内,白色目标精度为±5%,浅灰色目标精度为±6%,灰色目标精度为±6%
- 测距角度:水平60°、垂直60°、对角90°
- 激光安全等级:符合Class 1激光安全标准
- 电源参数:
- 数据接口:
- 数据接口:I2C/UART/USB
- 接口形式:PH2.0-4P(Gravity线序)
- I2C地址:0x30/0x31/0x32/0x33 四种可调
- 串口波特率:115200bps(固定值,不可修改)
- 固件更新:TYPE-C,U盘方式
documentstart
相关文档
documentsend
配送清单
- 8*8矩阵激光测距传感器 ×1
- PH2.0-4P连接线 ×1
- 铝合金安装支架×1
- 铝合金支撑支架×1
- M3手拧螺丝×4 (银色、黑色随机发)
- M3传感器固定螺丝×2
- M3×35安装铜柱×2(黄色、黑色随机发)











 全部商品分类﹀
全部商品分类﹀


 沪公网安备31011502402448
沪公网安备31011502402448
