|
40186| 25
|
[项目] 基于MPU6050六轴运动传感器的手臂动捕 |

 上次发过一个同样基于MPU6050传感器制作的手套。这次分享一下手臂的动捕,两个设备是完全兼容的(后续补上)。 放个佩戴的图片。上臂(近手肘处)、下臂(近手腕处)、手背各佩戴了一个传感器。设备的主板放在手腕处。  上视频: 现在来看看硬件吧  手背上的传感器器:  下臂(近手腕处)的主板(MCU、蓝牙、USB、传感器)。PS:主板上留了两组拓展接口,可以满足后面的各种开发需求 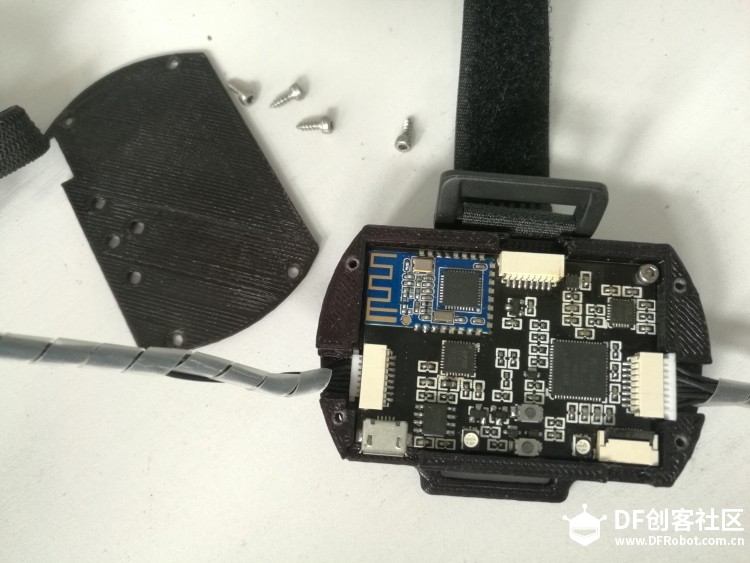 上臂(近手肘处)的传感器 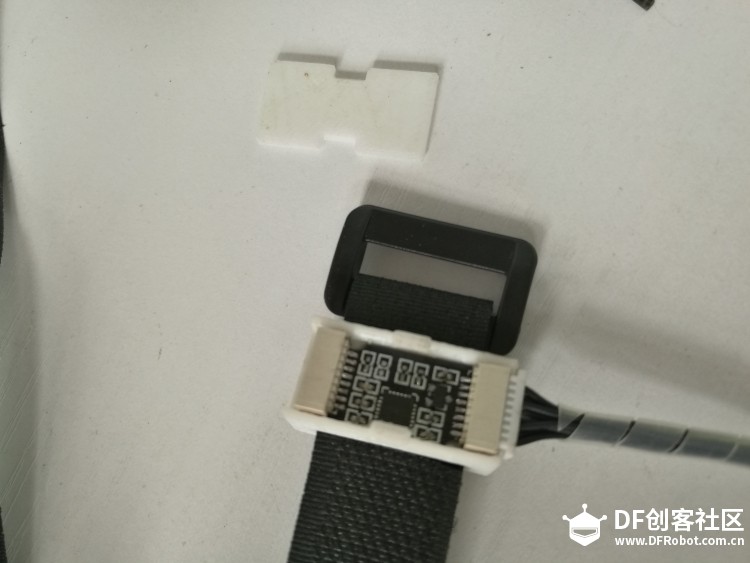 现在来聊聊MPU6050。这颗传感器集成了三轴加速度和三轴陀螺仪,没有磁场传感器哦。但是这颗传感器有一个内置的DMP功能,可以直接输出传感器的姿态。熟悉的朋友应该是知道的。先来看看DMP模式下的效果吧 首先是Processing下的,简单说明下这里用的硬件是Arduino Pro Micro+MPU6050 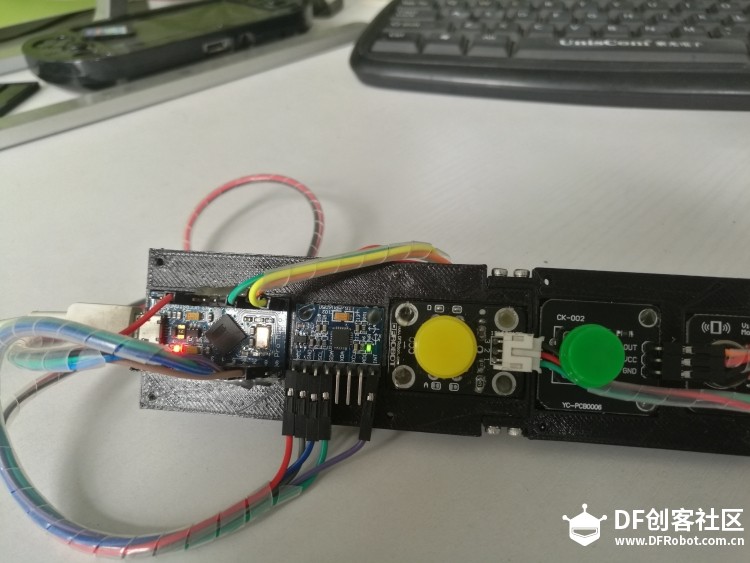 接着是Unity下的,这里只用了主板及板载传感器 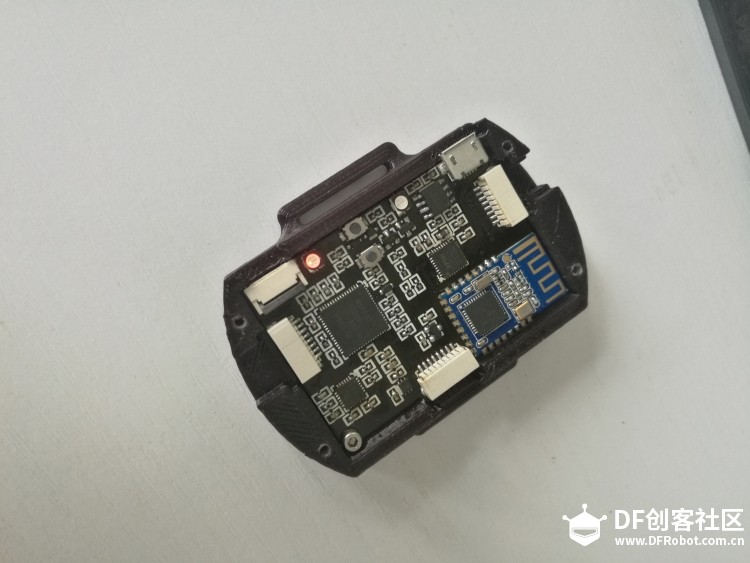 |
 编辑选择奖
编辑选择奖



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








