安卓手机程序---
- package com.example.myfirstapp;
-
- import java.io.IOException;
- import java.io.OutputStream;
- import java.util.UUID;
-
- import android.app.Activity;
- import android.os.Bundle;
-
- import android.bluetooth.BluetoothAdapter;
- import android.bluetooth.BluetoothDevice;
- import android.bluetooth.BluetoothSocket;
- import android.content.DialogInterface;
- import android.content.DialogInterface.OnClickListener;
- import android.provider.ContactsContract.CommonDataKinds.Event;
-
- import android.util.Log;
- import android.view.MotionEvent;
- import android.view.View;
- import android.widget.Button;
- import android.widget.Toast;
-
- public class MainActivity extends Activity
- {
-
- private static final String TAG = "THINBTCLIENT";
-
- private static final boolean D = true;
-
- private BluetoothAdapter mBluetoothAdapter = null;
-
- private BluetoothSocket btSocket = null;
-
- private OutputStream outStream = null;
- Button mButtonF;
- Button mButtonB;
- Button mButtonL;
- Button mButtonR;
- Button mButtonS;
-
- private static final UUID MY_UUID = UUID.fromString( "00001101-0000-1000-8000-00805F9B34FB" );
-
- private static String address = "88:33:14:DF:1F:FD";
-
- /** Called when the activity is first created. */
- @Override
- public void onCreate( Bundle savedInstanceState )
- {
- super.onCreate(savedInstanceState);
- setContentView(R.layout.main);
-
- //前进
- mButtonF=(Button)findViewById(R.id.btnF);
- mButtonF.setOnTouchListener(new Button.OnTouchListener()
- {
- @Override
- public boolean onTouch(View v, MotionEvent event)
- {
- String message;
- byte[] msgBuffer;
- int action = event.getAction();
- switch(action)
- {
- case MotionEvent.ACTION_DOWN:
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
- message = "w";
- msgBuffer = message.getBytes();
- try
- {
- outStream.write(msgBuffer);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- break;
-
- case MotionEvent.ACTION_UP:
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
- message = "0";
- msgBuffer = message.getBytes();
- try
- {
- outStream.write(msgBuffer);
-
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- break;
- }
- return false;
- } // end of onTouch
- });
-
- //后退
- mButtonB=(Button)findViewById(R.id.btnB);
- mButtonB.setOnTouchListener(new Button.OnTouchListener()
- {
- @Override
- public boolean onTouch(View v, MotionEvent event)
- {
- // TODO Auto-generated method stub
- String message;
- byte[] msgBuffer;
- int action = event.getAction();
- switch(action)
- {
- case MotionEvent.ACTION_DOWN:
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
- message = "s";
-
- msgBuffer = message.getBytes();
-
- try
- {
- outStream.write(msgBuffer);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- break;
-
- case MotionEvent.ACTION_UP:
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
- message = "0";
-
- msgBuffer = message.getBytes();
- try
- {
- outStream.write(msgBuffer);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- break;
- }
-
- return false;
- } // end of onTouch
- }); // end of setOnTouchListener
-
- //左转
- mButtonL=(Button)findViewById(R.id.btnL);
- mButtonL.setOnTouchListener(new Button.OnTouchListener()
- {
- @Override
- public boolean onTouch(View v, MotionEvent event)
- {
- // TODO Auto-generated method stub
- String message;
- byte[] msgBuffer;
- int action = event.getAction();
- switch(action)
- {
- case MotionEvent.ACTION_DOWN:
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
- message = "a";
- msgBuffer = message.getBytes();
- try
- {
- outStream.write(msgBuffer);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- break;
-
- case MotionEvent.ACTION_UP:
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
- message = "0";
- msgBuffer = message.getBytes();
-
- try
- {
- outStream.write(msgBuffer);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- break;
- }
-
- return false;
- }
- });
-
- //右转
- mButtonR=(Button)findViewById(R.id.btnR);
- mButtonR.setOnTouchListener(new Button.OnTouchListener()
- {
- @Override
- public boolean onTouch(View v, MotionEvent event)
- {
- // TODO Auto-generated method stub
- String message;
- byte[] msgBuffer;
- int action = event.getAction();
- switch(action)
- {
- case MotionEvent.ACTION_DOWN:
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
- message = "d";
- msgBuffer = message.getBytes();
- try
- {
- outStream.write(msgBuffer);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- break;
-
- case MotionEvent.ACTION_UP:
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
- message = "0";
- msgBuffer = message.getBytes();
-
- try
- {
- outStream.write(msgBuffer);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- break;
- }
-
- return false;
- }
- });
-
- //停止
- mButtonS=(Button)findViewById(R.id.btnS);
- mButtonS.setOnTouchListener(new Button.OnTouchListener()
- {
- @Override
- public boolean onTouch(View v, MotionEvent event)
- {
- // TODO Auto-generated method stub
- if (event.getAction()==MotionEvent.ACTION_DOWN)
- try
- {
- outStream = btSocket.getOutputStream();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
-
- String message = "0";
-
- byte[] msgBuffer = message.getBytes();
-
- try
- {
- outStream.write(msgBuffer);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- return false;
- }
- });
-
- if ( D )
- Log.e(TAG, "+++ ON CREATE +++");
- mBluetoothAdapter = BluetoothAdapter.getDefaultAdapter();
-
- if (mBluetoothAdapter == null)
- {
- Toast.makeText(this, "Bluetooth is not available.", Toast.LENGTH_LONG).show();
- finish();
- return;
- }
-
- if (!mBluetoothAdapter.isEnabled())
- {
- Toast.makeText(this, "Please enable your Bluetooth and re-run this program.", Toast.LENGTH_LONG).show();
- finish();
- return;
- }
-
- if ( D )
- Log.e(TAG, "+++ DONE IN ON CREATE, GOT LOCAL BT ADAPTER +++");
- } // end of onCreate
-
- @Override
- public void onStart()
- {
- super.onStart();
- if (D)
- Log.e(TAG, "++ ON START ++");
- }
-
- @Override
- public void onResume()
- {
- super.onResume();
- if ( D )
- {
- Log.e(TAG, "+ ON RESUME +");
- Log.e(TAG, "+ ABOUT TO ATTEMPT CLIENT CONNECT +");
- }
- BluetoothDevice device = mBluetoothAdapter.getRemoteDevice(address);
-
- try
- {
- btSocket = device.createRfcommSocketToServiceRecord(MY_UUID);
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON RESUME: Socket creation failed.", e);
- }
- mBluetoothAdapter.cancelDiscovery();
- try
- {
- btSocket.connect();
- Log.e(TAG, "ON RESUME: BT connection established, data transfer link open.");
- }
- catch (IOException e)
- {
- try
- {
- btSocket.close();
- }
- catch (IOException e2)
- {
- Log .e(TAG,"ON RESUME: Unable to close socket during connection failure", e2);
- }
- }
-
- // Create a data stream so we can talk to server.
- if ( D )
- Log.e(TAG, "+ ABOUT TO SAY SOMETHING TO SERVER +");
- /* try {
- outStream = btSocket.getOutputStream();
- } catch (IOException e) {
- Log.e(TAG, "ON RESUME: Output stream creation failed.", e);
- }
-
-
- String message = "1";
-
- byte[] msgBuffer = message.getBytes();
-
- try {
- outStream.write(msgBuffer);
-
- } catch (IOException e) {
- Log.e(TAG, "ON RESUME: Exception during write.", e);
- }
- */
- }
-
- @Override
- public void onPause()
- {
- super.onPause();
-
- if ( D )
- Log.e(TAG, "- ON PAUSE -");
- if (outStream != null)
- {
- try
- {
- outStream.flush();
- }
- catch (IOException e)
- {
- Log.e(TAG, "ON PAUSE: Couldn't flush output stream.", e);
- }
- }
-
- try
- {
- btSocket.close();
- }
- catch (IOException e2)
- {
- Log.e(TAG, "ON PAUSE: Unable to close socket.", e2);
- }
-
- }
-
- @Override
- public void onStop()
- {
- super.onStop();
-
- if ( D )
- Log.e(TAG, "-- ON STOP --");
- }
-
- @Override
- public void onDestroy()
- {
- super.onDestroy();
-
- if ( D )
- Log.e(TAG, "--- ON DESTROY ---");
- }
-
- // @Override
- // protected void onCreate(Bundle savedInstanceState) {
- // super.onCreate(savedInstanceState);
- // setContentView(R.layout.activity_main);
- // }
- //
- // @Override
- // public boolean onCreateOptionsMenu(Menu menu) {
- // // Inflate the menu; this adds items to the action bar if it is present.
- // getMenuInflater().inflate(R.menu.main, menu);
- // return true;
- // }
- }
|





 置顶卡
置顶卡 变色卡
变色卡 千斤顶
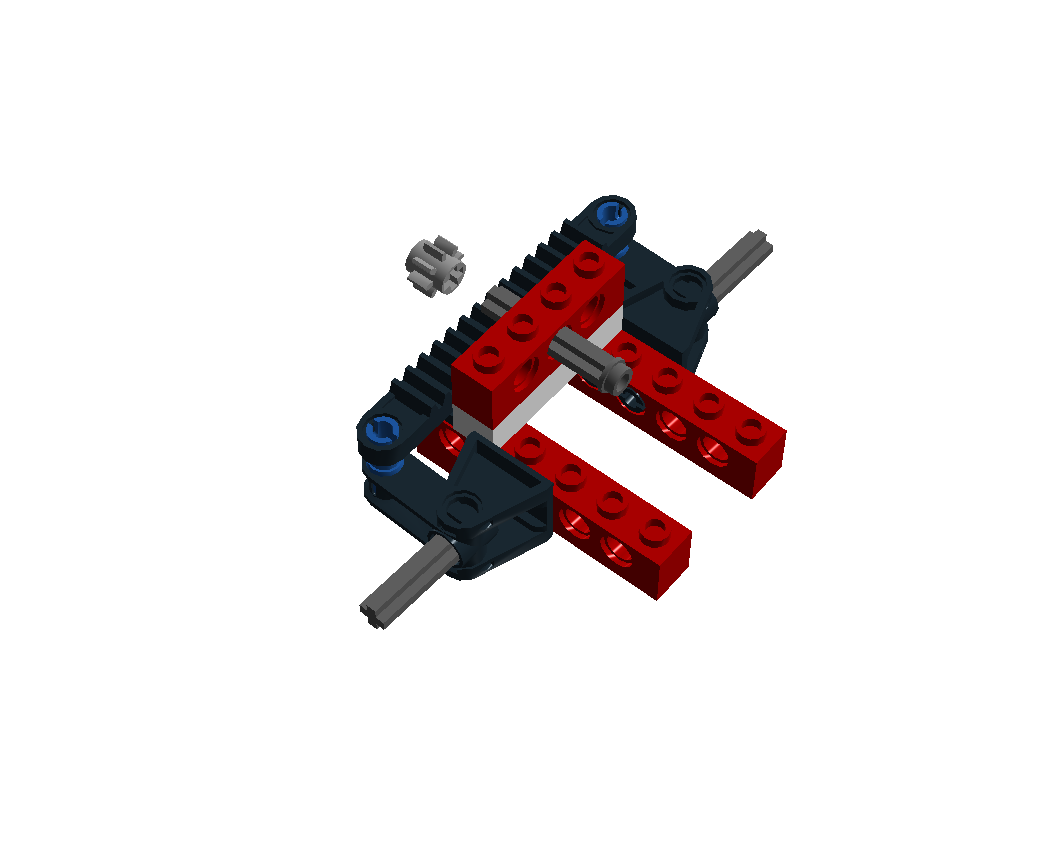
千斤顶