|
15196| 10
|
[HCRbot系列教程] HCRbot 系列 9──控制 HCRbot 机器人绘制平面地图(SLAM) |

|
这是 HCRbot 机器人的第 9 篇,这一章节主要介绍如何控制 HCRbot 绘制室内平面地图来做 SLAM。前面 8 篇讲了那么多废话,这一章开始,终于到了激动人心检验自己劳动成果的时候了! 下面是目前已经写好的所有篇章链接:
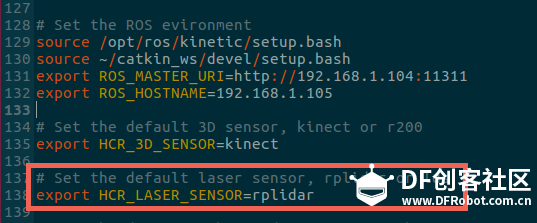
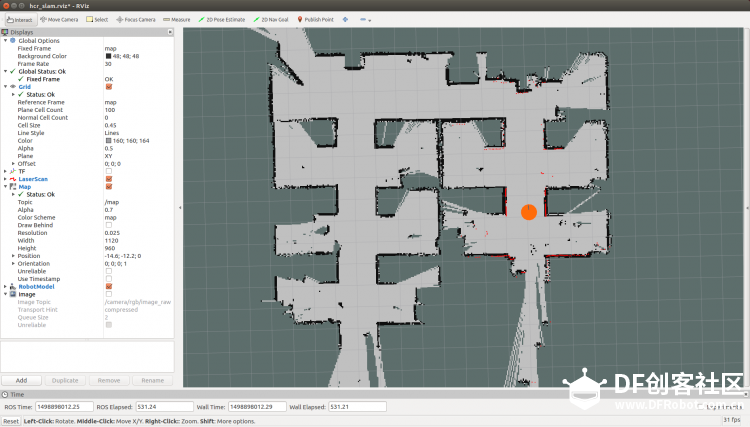
通过上一篇章,相信你已经会远程控制 HCRbot 机器人运动了,这一章将会用到之前学过的知识,远程控制 HCRbot 机器人在房间内运动,同时 HCRbot 机器人根据传感器“看到”的场景,将房间内的地图绘制下来,为下一章自动导航做准备。 启动 HCRbot 机器人请确保你已经学习了上一章节 【HCRbot 系列 7──启动 HCRbot 机器人】 章节相关内容,那么根据上一章节的内容启动 HCRbot 机器人吧。 运动控制你可以使用键盘或者 Xbox Joystick 来控制 HCRbot 机器人绘制房间平面二维地图。 【Remote PC】 用 Xbox Joystick (Xbox 手柄)遥控 HCRbot 机器人运动建图(推荐): 当然,如果你没有 Xbox Joystick 的话,也可以用电脑上的键盘: 【Remote PC】 用键盘遥控 HCRbot 运动建图: 使用激光雷达 RPLIDAR 绘图如果使用 RPLIDAR A1/A2 做房间平面地图绘制,请编辑 .bashrc 文件,修改 HCR_LASER_SENSOR 参数为 rplidar,如下图: 【HCRbot 机器人】 ssh 进入 HCRbot 机器人,运行: 【Remote PC】 在远程主机上打开 Rviz 可视化界面: 然后用键盘或者 Xbox Joystick 控制 HCRbot 运动,建图:
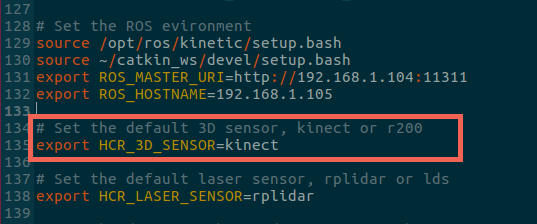
下面是演示效果: 使用 Xbox 360 Kinect 或 RealSense R200 摄像头建图如果使用 Xbox 360 Kinect 做SLAM,请编辑 .bashrc 文件,修改 HCR_3D_SENSOR 参数为 kinect ,如下图: 【HCRbot 机器人】 ssh 进入 HCRbot 机器人,运行: 【Remote PC】 在远程主机上打开 Rviz 可视化界面: 【HCRbot】 ssh 进入 HCRbot 机器人,保存地图: 最后的演示效果和激光雷达差不多,原谅我再次忘记拍视频了…… 后记你要是对 ROS 有一定了解,或者感兴趣的话,还可以试试 Hector Mapping 和 Google Cartographer 等各种绘制平面二维地图的算法~ 如果有大神做好的话,欢迎在评论里po上步骤和演示视频哈~(实际上我又偷懒了哈哈哈) |



© 2013-2024 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 老版主限定
老版主限定
 创作达人
创作达人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






